Production year
2020

© Cyril FRESILLON / PPRIME / CNRS Images
20200037_0015
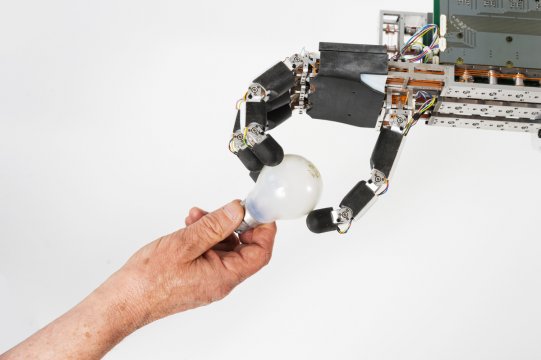
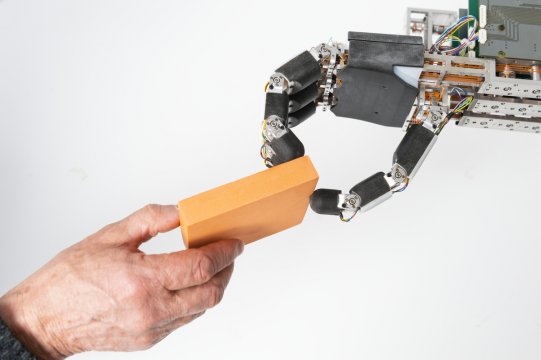
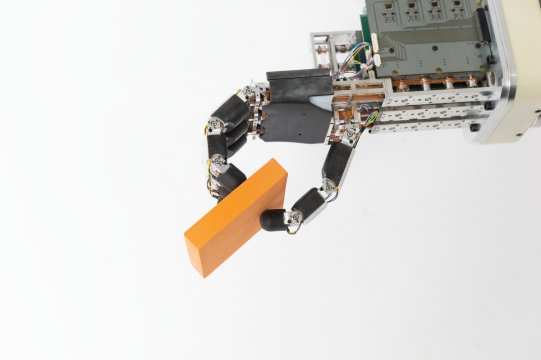
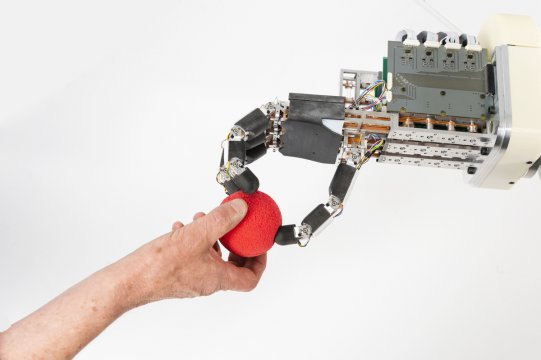
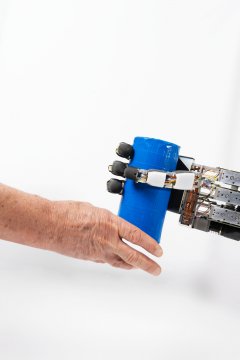
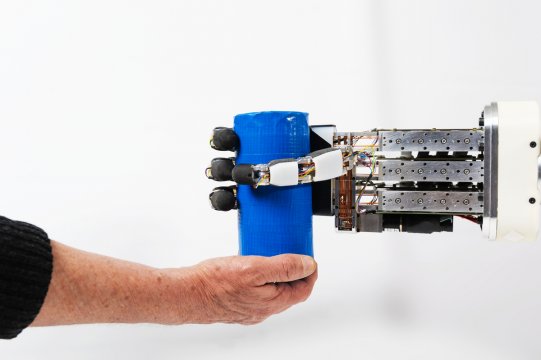
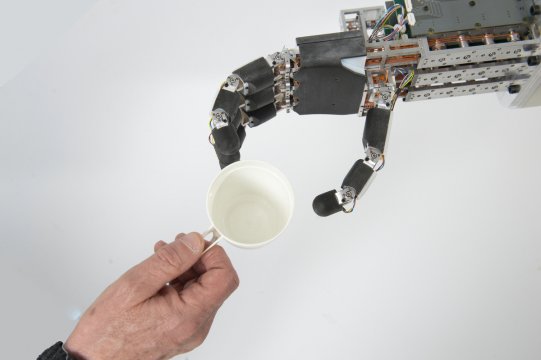
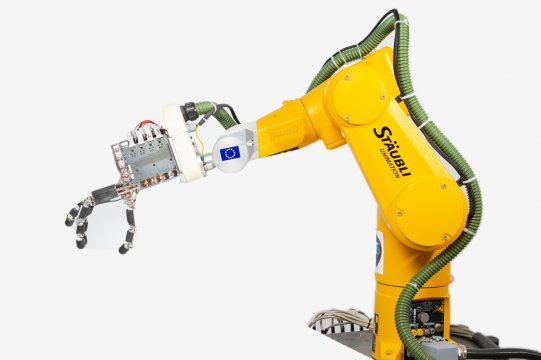
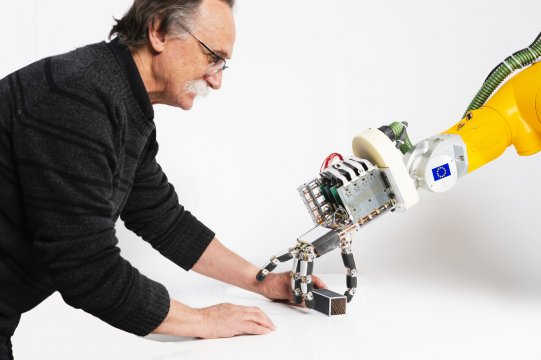
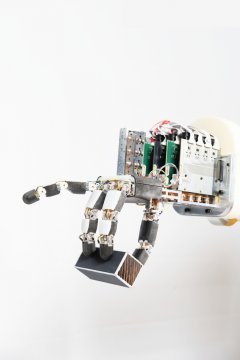
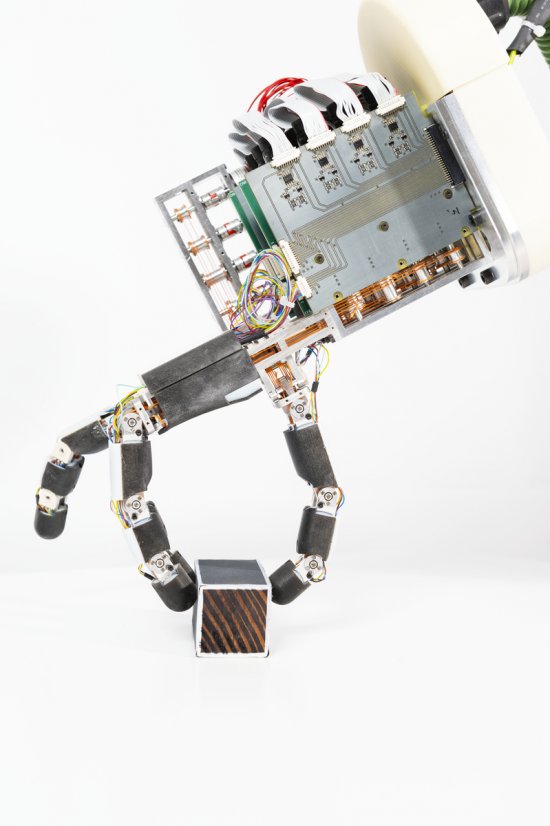
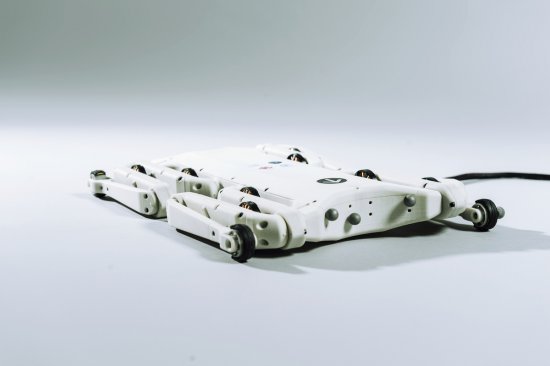
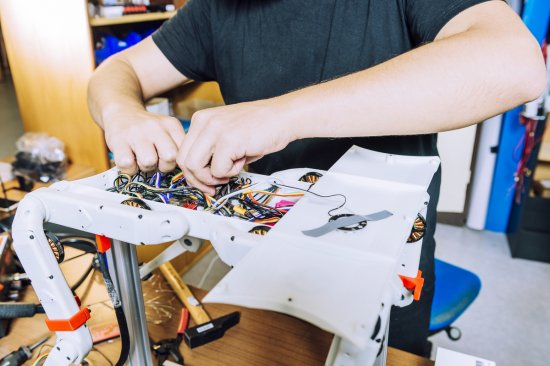
Main robotique à haut niveau de dextérité, à 4 doigts et 16 actionneurs. Elle est capable de saisir une grande variété d’objets (rigides, souples, etc.) tout en garantissant leur stabilité et en préservant l’intégrité physique des objets fragiles, grâce à une technologie d’évaluation des efforts de serrage couplée d’une capacité naturelle à adapter la rigidité de ses gestes (compliance). Grâce au nombre élevé d’actionneurs (un par articulation), elle s’adapte à la forme de l’objet saisi (on parle de saisie adaptative) et peut le déplacer finement à l’intérieur de la main. Son quatrième doigt lui permet de repositionner l’objet saisi sans avoir à le déposer et le reprendre. Elle est ainsi capable de produire des mouvements fins de grande amplitude ou de réorienter l'objet saisi. L’objectif de cette main robotique, l’une des plus habiles au monde, est d’égaler les capacités de préhension d’une main humaine.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.